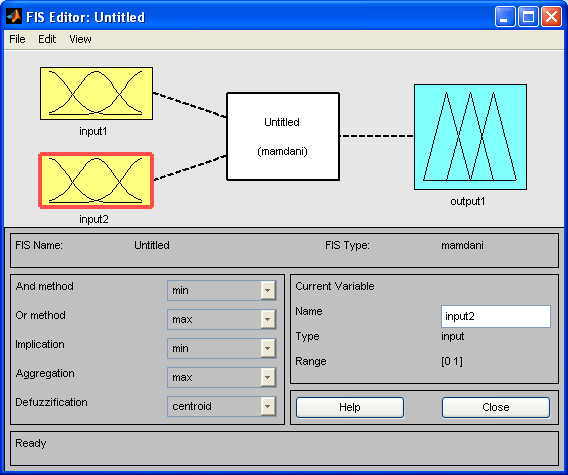
Рис. 1. Ввод входных переменных
Целью настоящей лабораторной работы является изучение основ проектирования нечетких систем управления на основе инструментального средства Fuzzy Logic Toolbox среды Matlab.
Входные величины:
Выходная величина:
Сила торможения (0-100).
Термы для лингвистических переменных расстояние и скорость: очень_мало (VS), мало (S), средне (M), велико (B), очень_велико (VB).
Для лингвистической переменной сила_торможения задать следующие термы: близка_к_нулю (Z), четверть (OQ), половина (H), три_четверти (TQ), полная (FU).
Исходные данные для моделирования представлены в таблицах 1-4:
| Название терма (NAME) | Тип функции принадлежности (TYPE) | Диапазон изменения (PARAMS) |
|---|---|---|
| Очень малая | трапецеидальная | [0 0 20 60] |
| Малая | треугольная | [20 60 100] |
| Средняя | треугольная | [60 100 140] |
| Большая | треугольная | [100 140 180] |
| Очень большая | трапецеидальная | [140 180 200 200] |
| Название терма (NAME) | Тип функции принадлежности (TYPE) | Диапазон изменения (PARAMS) |
|---|---|---|
| Очень малая | трапецеидальная | [0 0 50 150] |
| Малая | треугольная | [50 150 250] |
| Средняя | треугольная | [150 250 350] |
| Большая | треугольная | [250 350 450] |
| Очень большая | трапецеидальная | [350 450 500 500] |
| Название терма (NAME) | Тип функции принадлежности (TYPE) | Диапазон изменения (PARAMS) |
|---|---|---|
| Близка к нулю | трапецеидальная | [0 0 10 30] |
| Четверть | треугольная | [10 30 50] |
| Половина | треугольная | [30 50 70] |
| Три четверти | треугольная | [50 70 90] |
| Полная | трапецеидальная | [70 80 100 100] |
| Скорость | ||||||
|---|---|---|---|---|---|---|
| VS | S | M | B | VB | ||
| Расстояние | VS | H | TQ | FU | FU | FU |
| S | OQ | H | TQ | FU | FU | |
| M | Z | OQ | H | TQ | FU | |
| B | Z | Z | OQ | H | TQ | |
| VB | Z | Z | Z | OQ | H | |
Рис. 1. Ввод
входных переменных
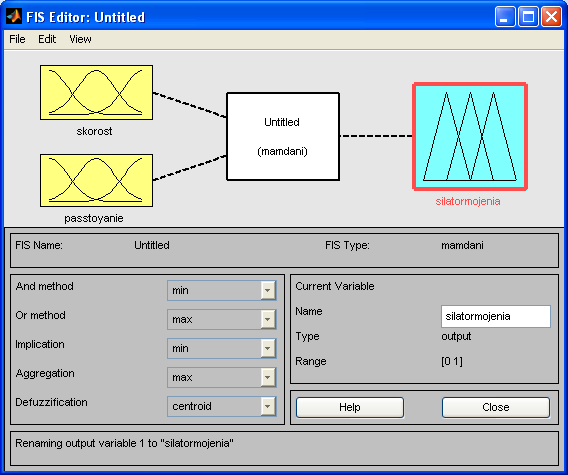
Рис. 2. Задание термов для скорости, расстояния и силы
торможения
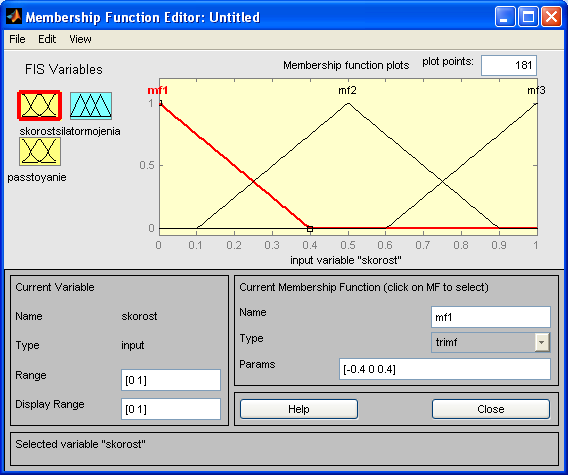
Рис. 3.
Редактор функций принадлежности
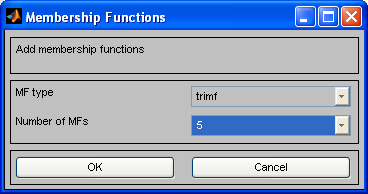
Рис. 4.
Задание количества и типа термов
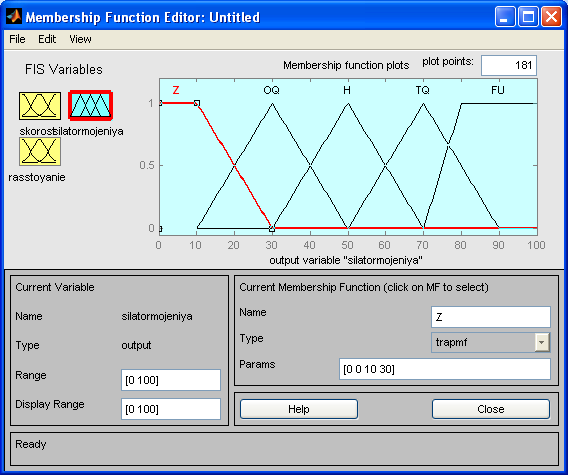
Рис. 5. Окно редактора функции при вводе значений
переменной
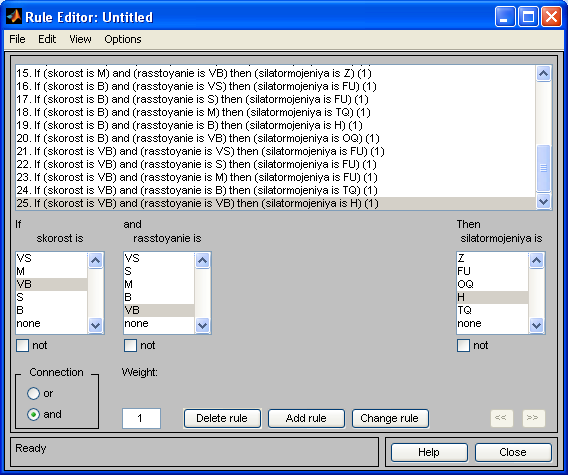
Рис. 6. Окно
редактора правил
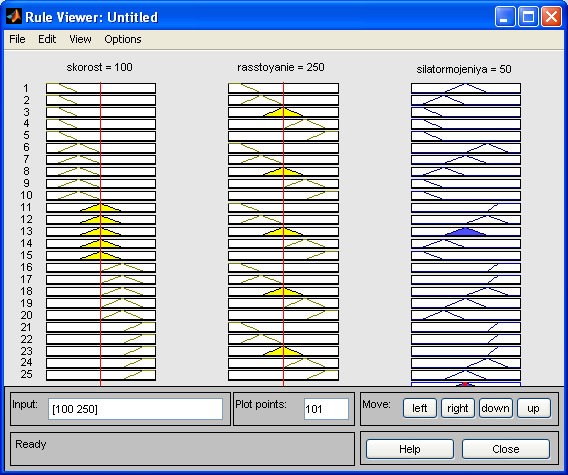
Рис. 7. Окно логического вывода в графической форме
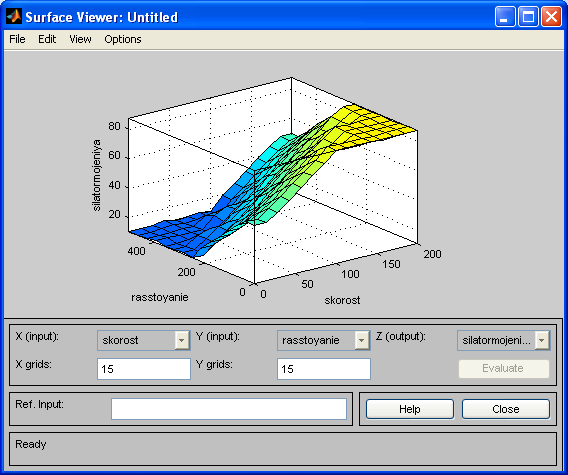
Рис. 8. Окно
поверхности вывода
По заполненной базе знаний мы получили в результате использования инструмента нечеткой логики вполне четкие данные, которые позволяют измерить достаточно четко силу торможения, необходимую для определенного тормозного пути при определенной скорости.
Пользуйся браузерами Yandex, Firefox, Opera, Edge - они правильно отражают формулы, встречающиеся на страницах, как в десктопном, так и в мобильном вариантах.
Отключи на минуту блокираторы рекламы и нажми на пару баннеров на странице. Тебе ничего не будет стоить, а сайту поможешь материально.